

舵机的控制原理,舵机控制原理程序
舵机的控制原理
舵机的控制原理
舵机是一种常见的执行器,广泛应用于自动化设备、机器人和工业控制等领域。它能够将接收到的控制信号转换为精确的角度运动,实现精确的位置控制。本文将详细探讨舵机的控制原理,包括其工作方式、核心组件以及控制机制。
舵机的构成
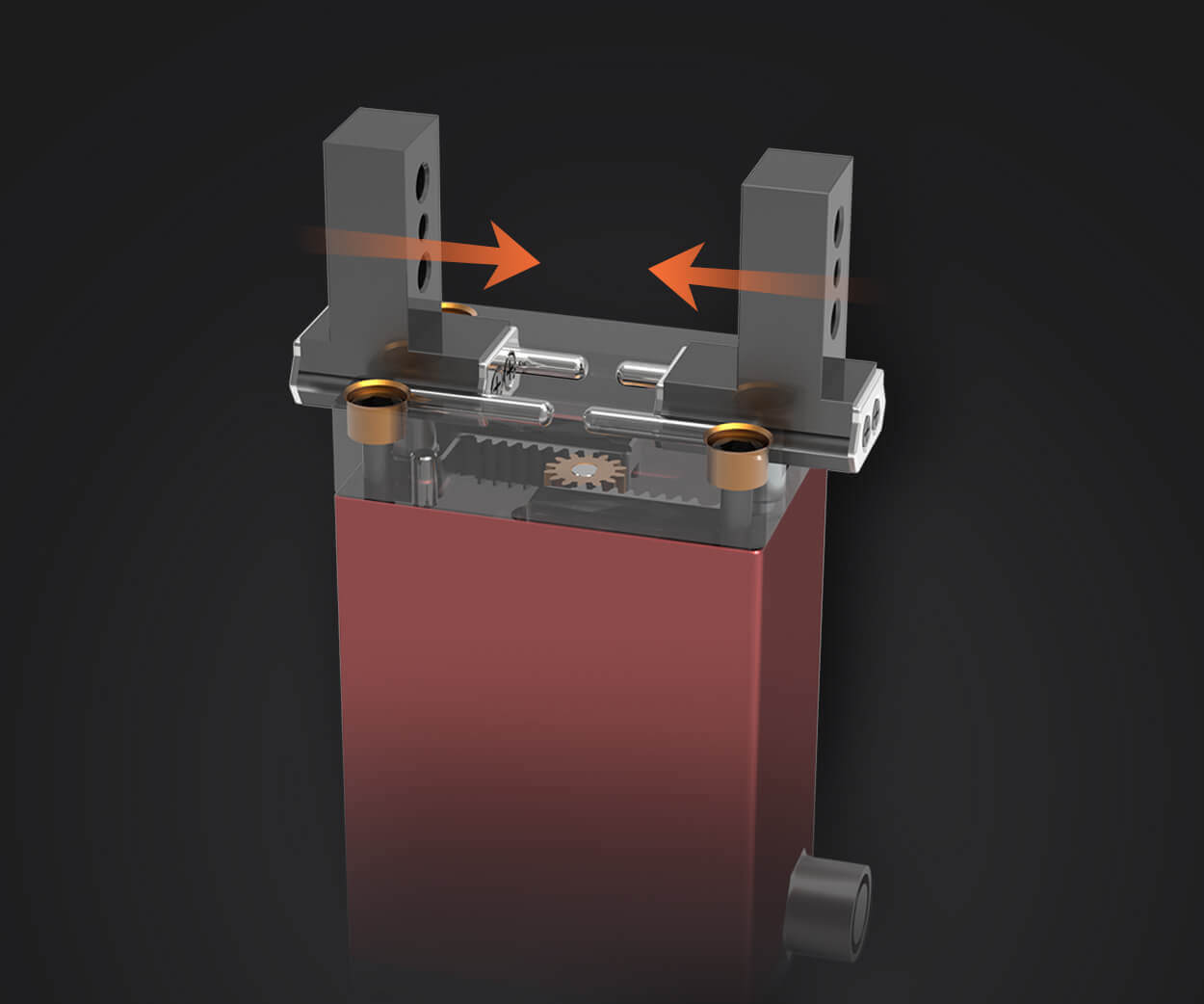
舵机主要由以下几部分组成:
- 电动机:通常为无刷电机,提供旋转力。
- 减速齿轮组:将电机的高速旋转转换为低速高扭矩的机械运动。
- 位置传感器:通常是旋转编码器,用于检测舵机的当前角度。
- 控制电路:包括驱动电机的电子元件和处理控制信号的微控制器。
工作原理
舵机的核心在于通过位置反馈实现精确的位置控制。其控制过程通常分为以下几个步骤:
- 控制信号输入:舵机接收PWM(脉宽调制)信号,该信号包含角度信息。
- 信号处理:控制电路解析PWM信号,确定目标角度。
- 执行运动:根据目标角度,驱动电机旋转,通过减速齿轮组调整舵臂角度。
- 位置反馈:传感器实时监测舵臂位置,并将数据反馈给控制电路。
- 误差校正:根据反馈信号与目标信号的差异,调整电机输出,确保精确到达目标角度。
舵机的控制信号
舵机的控制主要依赖PWM信号。PWM信号通过调节脉冲宽度来传递信息,宽脉冲对应大角度,窄脉冲对应小角度。标准PWM信号通常在1ms到2ms之间变化,对应舵机的0度到180度运动范围。
闭环控制系统的应用
舵机采用闭环控制系统,确保位置的精确控制。系统会持续比较实际角度与目标角度,通过调整电机速度和方向来消除误差。这种反馈机制使得舵机能够在复杂环境下稳定工作,适用于高精度要求的场合。
高精度控制的技术
为了提高控制精度,现代舵机采用高分辨率传感器和先进的控制算法。例如,增量式编码器每转提供数万个脉冲,确保微米级的角度控制。结合PID(比例-积分-微分)算法,系统能够快速响应并精确调整,有效减少误差。
应用领域
舵机广泛应用于多个领域:
- 机器人技术:用于关节和 grippers 的精确控制。
- 工业自动化:在机械臂和自动化设备中实现精准定位。
- 航模和无人机:用于控制飞行器的俯仰、偏航和横滚角度。
- 智能家居:控制阀门、门窗等设备的角度位置。
未来发展趋势
随着技术进步,舵机将朝着更高精度、更快响应速度和更长寿命方向发展。智能控制算法、新型材料和制造技术的结合将提升舵机性能,扩展其应用领域。
总结
舵机作为关键执行器,在现代自动化系统中扮演重要角色。其基于PWM信号的闭环控制系统,确保了精确的位置控制。随着技术的发展,舵机将在更多领域提供高效可靠的运动控制解决方案。
公司位于东莞市横沥镇,现有员工300余人,拥有47,000m²的生产制造场地,每月生产传动模组/电机超过650,000。










